三维点云技术在传统园林视觉空间分析中的应用:寄畅园案例研究
基于LiDAR点云的中国传统园林视觉空间定量分析方法——以寄畅园为例
摘要
【目的】中国传统园林空间复杂多变,传统的分析方法难以深入探索传统园林复杂的三维视觉空间特征。三维激光雷达(lightdetectionandranging,LiDAR)点云技术在传统园林空间研究方面具有精度高、信息全等优势,借助LiDAR点云技术深入探索中国传统园林视觉空间特征,可为现代人居环境空间营造提供借鉴与参考。
【方法】基于LiDAR点云技术提出一套适用于中国传统园林视觉空间分析的方法,并以三维可视性、视野舒展度及景物视野占比3项指标量化描述视觉空间。
【结果】以寄畅园为例,构建了寄畅园LiDAR点云体素模型,利用提出的方法对锦汇漪西侧滨水步道11个视点的视觉空间进行了量化分析,解析了寄畅园的视觉空间特征,并探究了该步道的空间感知序列。
【结论】证实了利用LiDAR点云技术展开传统园林视觉空间研究的可行性与准确性,提出的方法可应用于其他传统园林视觉空间的分析研究中。
关键词:LiDAR点云;中国传统园林;视觉空间;定量分析;三维可视性;视野舒展度;景物视野占比;寄畅园
人类主要经由视觉来感知景观空间与环境[1],因此视觉景观研究一直是风景园林研究的核心议题之一[2]。对中国传统园林的景观空间进行视觉分析,挖掘其视觉特征,对空间营建精髓的传承具有指导意义。
有别于西方古典园林和现代园林,中国传统园林空间更为复杂多变[3]。仅依托定性描述的视觉空间分析很难能体现传统园林空间丰富的视觉体验[4]。因此,近年来许多学者都尝试用量化分析的方法解析中国传统园林的视觉空间。
既有研究多利用平面或图片等二维信息解析传统园林的空间特征,如魏胜林等[5]借助测距仪和矢量平面图,从视距、视角的角度解析了拙政园的空间特征,乐志等[6]基于图片网格对苏州古典园林进行了视觉质量评价,张甜甜等[7]借助海量图片,利用人工智能、空间句法量化探索了网师园的视觉时空感知形成机理。上述研究为解析园林空间特征提供了一定的量化方法与理论基础,然而基于二维信息的分析难以准确描述人本尺度下三维空间的形态特征(空间体量、边界、容量等)和视觉特征(可视范围、视野深度等),相关研究的科学化与精确化水平有待提高[8]。
为解决传统园林三维视觉空间研究的困境,相关研究多利用数字模型进行视域分析[9]。然而传统数字模型,如数字高程模型(digitalelevationmodel,DEM)、数字表面模型(digitalsurfacemodel,DSM)、实体模型(solidmodel)等,只能反映地面高程变化、建筑空间等信息,难以将植被、假山等要素进行精细建模,也因此无法准确描述传统园林空间复杂多变的特征。
目前,三维激光雷达(lightdetectionandranging,LiDAR)点云技术的出现有望弥补这一研究缺憾[10]。对比传统的数字模型,LiDAR采集的点云模型可以为视觉景观研究提供更详细的空间信息[11]。当下已经有诸多利用LiDAR点云技术进行视觉空间分析的研究,但大多聚焦于现代城市空间,如利用点云进行景观可视性分析[12-13]、城市绿视率分析[14]、城市街道封闭度研究[15]等。这些研究均强调了点云模型在分析复杂的植物形态、建筑环境时准确度高的优势。目前也有部分学者将点云技术应用于传统园林研究,但大多集中在假山研究,如针对上海豫园假山的三维建模与定量研究[16]、多种扫描技术相结合的苏州遂园三维建模[17]、传统园林中假山的三维建模与量化评价体系建立等[18]。目前在中国传统园林研究领域,利用点云技术解析空间视觉特征的案例仅有笔者先前对寄畅园的可视性分析[19]与观景视野分析[20],相关研究仍存在诸多内容有待挖掘。
因此,本研究旨在探索利用LiDAR点云技术深入分析中国传统园林视觉空间的可能性与应用场景。本研究选取江南四大名园之一寄畅园作为研究案例,主要内容包括:1)提出可以进行视觉分析计算的点云数据建模方法;2)构建传统园林视觉空间分析方法并提出基于视觉感知的量化指标;3)以寄畅园为例,利用上述方法分析传统园林的空间视觉特征。
1 基于LiDAR点云技术的视觉空间分析方法
利用点云对中国传统园林进行视觉景观分析具有数据完整度高与精度高的优势,然而基于此方法的相关研究成果较少。究其原因,笔者认为,此类研究面临着3个方面的挑战:构建可进行视觉空间分析和计算的点云模型的方法;确立获取视觉空间信息的视觉分析方法;提出利用上述信息进行视觉景观评估的指标。下文将就上述挑战论述本研究的技术路线。
1.1 基于LiDAR点云技术的视觉分析模型构建
1.1.1 由体素法主导的三维数字模型
在ArcGIS软件中进行视觉景观分析时,需要在具有实体或连续表面的数字模型中进行。而点云数据无实体或表面,因此需要在“点”的基础上构建具有实体的数字模型。常见的点云数据建模方式有3类:体素法(voxel-basedmethod)、表面法(surface-basedmethod)、射线追踪法(ray-tracingmethod)[21]。在这3类方法中,体素法虽然在模型精度上稍有不足,但具有建模速度快、后期运算效率高等优势。尤其是针对中国传统园林空间而言,过于精细的空间模型会产生大量冗余计算。同时,对于复杂度过高的传统园林空间,体素法可以通过调整体素颗粒度来平衡后期视觉分析计算精度与计算效率之间的关系。因此,本研究选取体素法生成基于点云的实体模型。
建立由体素法主导的三维数字模型主要包含3个步骤:1)清洗点云数据,删除游人等干扰信息,并将原始点云数据分为建筑、植被、假山、地面四大类;2)基于点云数据分别构建建筑、植被、假山的3D体素模型;3)利用地面点云数据构建DEM。其中,3D体素模型的构建包含2个部分:1)借助python的Open3D开源库对至少含有一个“点”的空间进行体素模型构建;2)缩减体素数据体量,利用八叉树(octree)算法搜索体素的周边信息,判断该体素是否被6个以上体素包围,如果命题为真,则该体素被其他体素包围,为冗余信息,该体素会被剔除。
1.1.2 通视分析
视觉研究的基础是探究视点与对象之间的可视关系,只有在对象“可视”的基础之上,才能进行视觉特征分析。因此,本研究采用的视觉分析方法为基于三维数字模型的通视分析(lineofsight)方法,具体操作步骤为:在模型空间中,根据研究需要选取视点;以视点为出发点,以研究场地的尺度来定义视线长度,按照均匀分布的水平角度与垂直角度生成三维构造视线。利用ArcGIS的通视分析工具,判断视线是否被景物所阻碍,记录阻碍物位置、体素编号及线段真实长度,并输出可视的、不被阻碍的三维视线。
1.2 景观视觉空间指标选取
在西方,关于景观视觉的研究已历经数十载,积累了众多的词汇(vocabulary)与指标(indicator),用以描述、评估、分析园林空间视觉特征[22]。其中,有三大类指标是被反复提及且值得关注的:1)关注可视空间自身尺度、范围与边界的指标,如开敞度[23]、郁闭度[24]、视觉规模(visualscale)[25]等;2)关注不同空间之间关联的指标,如连续度[26]、指向性[27]、序列[28]等;3)关注视觉空间中与可视内容相关的指标,如丰富度[29]、复杂度[30]、多样性[31]等。因此,对于以上三大类指标,本研究提出了3项基于点云三维可视性计算结果的量化指标:三维可视性(3Dvisibility)、视野舒展度(visualspread)、景物视野占比(featureratioofvisualfield)。其中,三维可视性用于描述可视景观空间的尺度、范围、边界;视野舒展度可以描述可视景观空间的形态和空间指向性,用于研究不同空间之间的视觉联系;景物视野占比用于描述可视空间内的可视内容及其占比。
1.2.1 三维可视性
区别于传统二维可视性的二元结果,三维模型下的可视性分析涵盖了多条三维视线,这些视线共同组成一个视点的三维可视性。计算式:V_{3D = \frac{V_{visi{V_{all = \frac{\sum_{k=1^{m r_k{\frac{4{3 \pi r^3 (V_{3D \in [0,1]) 式中,V_{3D为某一视点的三维可视性,V_{visi表示视点处的可视空间体积,r_k为可视视线k的长度,m为所有可视视线的数量,V_{all表示以视点为中心、以构造视线长度为半径的球体体积,r为构造视线长度(即可视性分析中所能看到的最远距离)。V_{3D=0,如果V_{visi=0,则表示该视点被完全遮挡,不存在可视空间;V_{3D=1,如果V_{visi=V_{all,则表示该视点在构造视线长度范围内完全不受遮挡。
1.2.2 视野舒展度
视野舒展度表示视点对应的可视空间的舒展程度。本研究利用近球率反映空间舒展度,如果可视空间近似于球体,那么该空间相对舒展,反之则表明该空间在某个方向的视线存在收缩,可视空间不规则。计算式:VS = \frac{\frac{4{3\pi \bar{r^3{\frac{4{3\pi r_{max^3 = (\frac{\bar{r{r_{max)^3 = (\frac{\sum_{k=1^{n r_k / n{r_{max)^3,VS \in (0,1] 式中,VS为某一视点的视野舒展度,\bar{r为所有可视视线的平均长度,n为参与可视性分析的构造视线数量,r_k为可视视线k的长度,r_{max为该视点的最远可视距离。如果VS=1,则表示该视点在任意方向的视线长度都相等,可视空间是以视点为中心的球体,舒展度高;如果VS趋近于0,则表示可视空间仅在某一方向舒展,其他方向较为紧缩,可视空间可能趋向于线性空间。
1.2.3 景物视野占比
景物视野占比描述的是在某一视点的视野画面中,各类景物所占的百分比。计算式:FR_i = \frac{N_i{N_v \times 100\%,(3)式中,FR_i为某一视点的景物视野占比,N_i为景物i体素模型的可视视线数量,N_v为所有构造视线的数量。
2 无锡寄畅园视觉空间分析
本研究选取无锡寄畅园作为研究案例,通过构建三维数字模型模拟寄畅园的景观空间,并选取寄畅园西侧的滨水步道为研究对象,利用本研究提出的视觉空间量化方法分析游览过程中的视觉空间体验。本次扫描所得的初始数据大小为31.8GB,共包含三维点约8.83 \times 10^9个。通过Realworks点云处理软件自动分类与人工分类方法对初始数据进行分类,将数据主要分为植被、建筑、假山、水体、地面、其他等,其中其他(如垃圾桶、交通工具、行人)作为干扰数据不纳入后续分析。
2.1 体素模型构建
1)建筑、植被及假山的体素建模。综合考虑计算效率与分析精度,本研究采用的体素边长为500mm。本研究曾尝试采用300mm、400mm边长的体素模型进行运算,但因单个视点运算量较大(300mm、400mm、500mm边长体素模型的运算时长分别为112.2h、73.6h、24.5h),且相同视点下运算结果差异较小(可视视线误差在3%~4%),最终选择边长为500mm的体素模型进行全视点运算。虽然该体素精度难以准确呈现植物枝叶的具体形态及半透明性,但相较于以往使用柱体或简化植物模型进行视觉分析的方法[32],本研究使用的体素模型可以较为真实地表现出植被的整体形态。由此本研究构建了寄畅园园林空间的三维体素模型(图1),包含假山体素25725个,植被体素399559个,建筑体素113529个,共计538813个体素。
2)地面DEM。因研究区域不存在明显的高程变化,本研究利用Realworks软件以10m为地面点云数据的平均间距进行抽稀工作。将抽稀后的点云数据作为高程点导入ArcGIS之中构建DEM。
3)构建寄畅园三维模型。综合园内的水体数据,拟合体素模型与DEM,完成寄畅园的三维数字模型构建。
2.2 通视分析与视觉空间分析
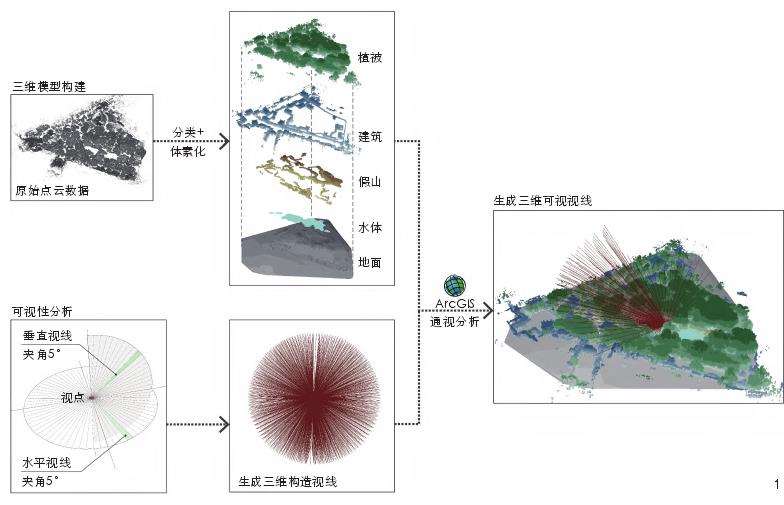
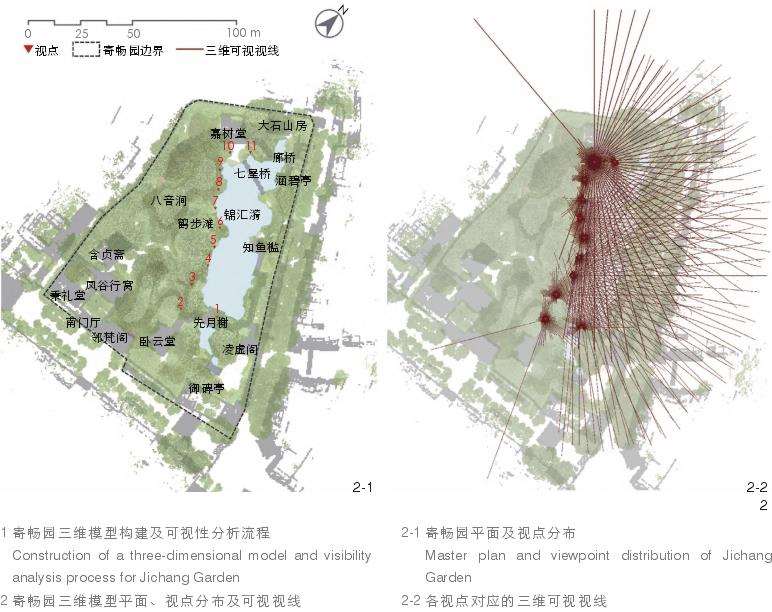
选取寄畅园内西侧的滨水步道作为研究对象,以10m为间距提取观察视点,视点高度为1.6m,共生成11个三维视点(图2-1)。以三维视点为中心,构建水平范围360°、垂直范围180°、水平及垂直夹角均为5°的三维构造视线(图1),来模拟人眼及头部活动状态下的可视球体范围,每个视点包含2089条三维构造视线。
将这些三维构造视线输入ArcGIS三维分析模块的通视分析中,同时选取阻碍物模型及DEM作为基础,生成三维可视视线,从而计算可视性。输出视线包含空间位置、线段长度、水平及垂直夹角等信息。随后,在通视分析结果的基础上,利用本研究提出的3项量化指标,分别对11个三维视点进行视觉空间分析。
3 视觉空间分析结果
3.1 三维可视性分析
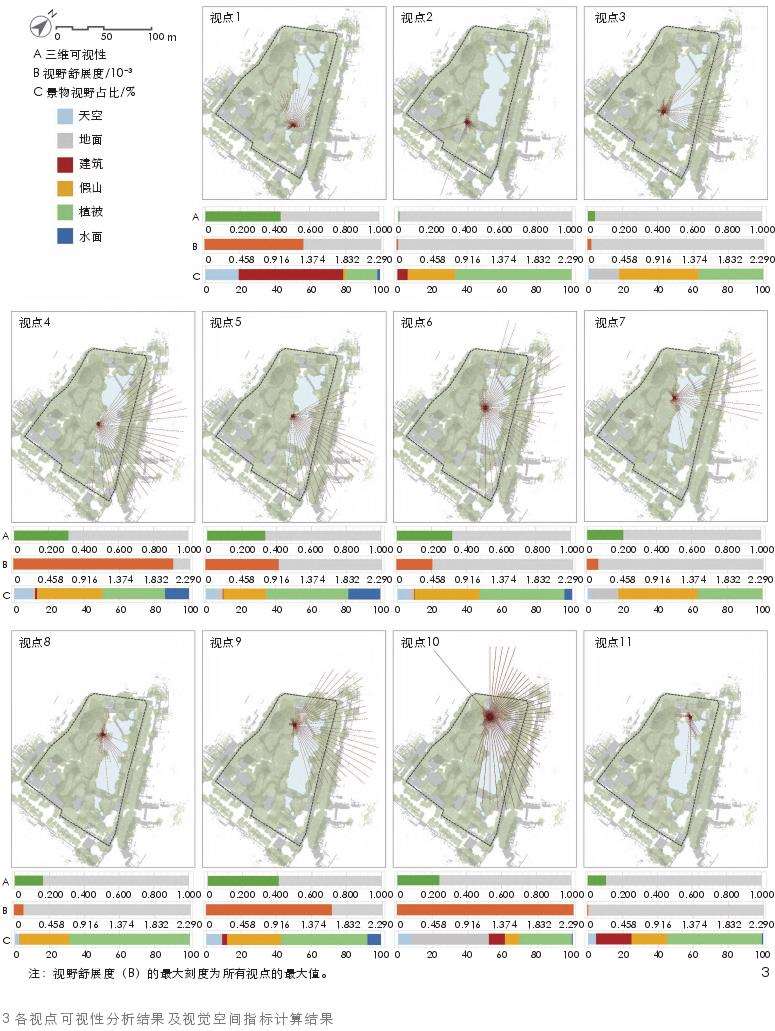
从总体分析结果(图2-2)来看,在游览滨水步道时,视线主要向水面方向展开,步道西侧基本被植被遮挡,视线无法穿透。将11个视点的可视性分析结果进行拆分,发现视点1、5、6、7、10具有比较开阔的视野,部分视线长度达100m(图3)。
3.2 视觉空间指标
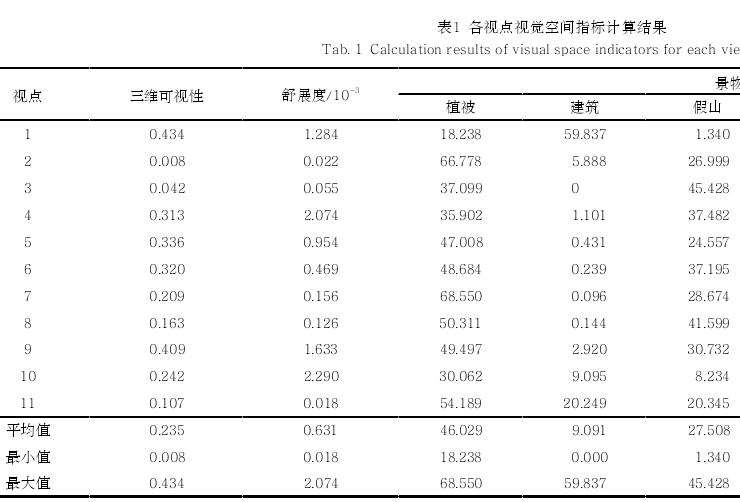
结合11个视点的视觉空间指标计算结果,发现视点1的三维可视性最高,位于先月榭观水平台,而视点2的三维可视性最低。视点10的视野舒展度最高,位于嘉树堂南侧广场,而视点11的视野舒展度最低。除视点1(建筑为主)与视点10(地面为主)以外,其他视点景物视野占比最高的都是植物元素;此外,在观水视野方面,视点5的水面占比最高,为18.334%(图3,表1)。
4 讨论
4.1 基于视觉空间指标的视觉特征解读
从三维可视性数据来看,视点4~9的数值基本大于0.250,最大值甚至达到了0.390;而从视野的组成要素来看,这些视野内基本都出现了天空、水面。由此可见,园内可以观赏开敞水面的视点对应的空间开敞度相对较高。然而却有2个例外:视点7、8的三维可视性较小,视点8的视野舒展度甚至低于0.130,基本不能看到水面和天空;视点7虽能看到天空,但水面也基本被遮挡。造成此现象的原因是在视点7、8附近,水面被植物和假山遮挡。此外,视点10(从嘉树堂南侧望向水面的视点)是寄畅园中著名的视点之一(借惠山景),其三维可视性的数据却小于视点4等视点,这是因为视点10位于水面的短边,观湖的视角宽度小于视点4等位于长边的视点。而视点1(从先月榭内望向水面的视点)作为寄畅园中另一著名的观湖视点,其可视范围甚至更小。通过观察视点1的视野组成要素,可以发现先月榭的屋顶限制了其可视范围的延伸。此外,视点2、3、11的可视性数据较小,是因为视点2、3位于被植物环绕的小路之上;视点11号则位于七星桥前,正好被桥两侧的树木遮挡了视线,在分析结果中表现为植被的视野占比较高。
综上可以看出,三维可视性可用于识别园林可视空间尺度,视野占比可用于分析可视空间尺度的成因,在加入视野舒展度指标后,则能进一步识别传统园林中视觉空间的形态特征。如视点1的三维可视性及视野舒展度较高,但可视性结果表明该视点的可视范围有限:一方面,屋顶限制了该视点上方的可视范围,但立面通透的水榭又保证了水平方向的可视空间继续向外舒展;另一方面,由于周围景观要素及地面的限制,虽然视线长度的最大值仅62m,但此处的可观赏景物类型较为丰富。
4.2 基于视觉空间指标的园路视觉空间研究
由11个沿路视点及其对应的可视空间特征可以看出,在这条不长的路径中,造园者安排了多次视觉空间转换。而且,本研究中沿路视点的采样密度有限,还有很多更细致的视觉空间转换未被揭示,如位于视点10与视点11之间一处开敞的观水空间(嘉树堂前)。从景观序列角度来看,游人从先月榭出发,经由鹤步滩到达嘉树堂的过程中,至少经历了以下空间感知过程。
1)先月榭—林间小径(九狮台附近):游人从先月榭建筑内的观湖空间步行来到小径上被群树环绕的郁闭空间。
2)林间小径—鹤步滩:游人从密闭度较高的环境突然转折到开敞度较高的观水空间,这种观水体验的峰值出现在视点5附近(鹤步滩处,一处三面环水的观水空间)。
3)鹤步滩—滨水小径(八音涧附近):游人的体验由开敞的观水空间过渡到观湖视野被植物等遮挡的郁闭空间,进一步丰富了观水体验,避免游人因一直处于相似的空间环境中而产生审美疲劳。
4)滨水小路—嘉树堂前:游人的体验由封闭的、植物主导的空间逐步转换成嘉树堂前开敞的观湖空间(锦汇漪西侧的滨水步道感知空间序列的终点)。除了关于空间序列的分析外,本研究提出的3个视觉空间指标还能用于评估道路的连续度、指向性等视觉空间特征,限于篇幅不作展开。
4.3 研究局限性
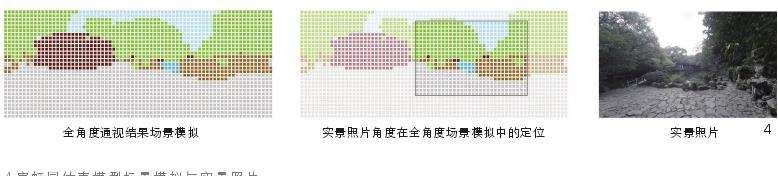
相较于传统空间分析方法而言,基于点云技术,针对中国传统园林视觉分析的精度与准确性已经提升了很多,但是此类研究的局限性依旧存在。首先,为了提高计算效率,对数字模型的精度有所牺牲。边长为500mm的体素虽然已经可以体现植物、建筑、假山等难以准确建模的景物要素的形态,但颗粒度较大使计算结果存在一定误差。以位于嘉树堂南侧小广场的视点10为例,分析该视点处的实景照片,发现照片的水面占比约为1.911%。利用通视分析结果的可视视线端点模拟视点10的全角度场景,并根据拍摄视角筛选出与实景照片相匹配的模拟画面,发现在30点素×20点素的画幅中水面占11个点位,占比为1.833%(图4)。尽管两者的计算结果存在一定差距,但误差较小,结合笔者相关研究[14],景物视野占比的量化分析结果基本可靠。
针对中国传统园林视觉空间的研究可细分为3个层次。第一层次:对园林物理环境特征进行的“物质环境分析”。第二层次:关于人们在园林空间内的生理性视觉感知反应,即“视觉感知分析”。第三层次:探讨人们在园林中的视觉感知与园林文化元素(如文字描述、典故等)相互影响的“景观意境分析”。本研究主要聚焦于第一层次,即园林的客观物理空间,因此无法直接探讨第二层次中人的视觉感知体验,也不涉及第三层次中将视觉感知与文化要素相结合的分析。此外,针对本研究提出的分析方法也存在一定局限性,因体素模型颗粒度较大,不能还原植物枝叶的形态及间隙,导致在研究中不能进一步探索植物的半透明性、具体形态对分析结果的影响。
5 总结与展望
本研究基于LiDAR点云技术,针对中国传统园林建立了一个包括数字建模、三维空间通视分析、视觉空间量化指标的方法体系。以寄畅园为例,对园内锦汇漪西侧滨水步道上的11个三维视点进行了视觉分析,在此基础之上对该步道的空间感知序列进行了探究。本研究进一步证实了点云技术在中国传统园林视觉空间分析中的潜力,基于该技术可以较为精准地解析传统园林空间特征,并对分析结果进行直观表达。
本研究提出的视觉分析方法与视觉量化指标可用于解析其他传统园林的视觉空间特征,通过横向比较不同传统园林视觉空间的共性与特性,可为当代风景园林空间营建提供参考,有助于对传统园林的传承与发展。本研究提出的方法还可拓展至现代园林空间的分析研究中,用以探索园林空间特征与视觉感知的关联,为当代人居环境建设提供参考。


