绿道规划创新:宿迁多源大数据融合与类A*算法路径模拟研究
摘要
【目的】当前在绿道系统规划分析中较少应用自下而上的人本分析视角和时空间行为分析方法,缺乏对居民在绿道中行为方式的研究,在方法上对于机器学习的应用仍然处于探索阶段。
【方法】以经典设计理论作为支撑,选取宿迁市中心城区作为案例地,整合手机信令数据、居民活动数据、街景数据等多源数据,借助人工智能、LSTM神经网络、时空行为分析等量化分析方法,分析居民真实出行的时空特征,提出绿道智能选线分析框架。
【结果】结合LSTM神经网络、类A算法等构建的轨迹模拟模型可有效开展绿道选线评估,模拟居民真实出行行为,提取潜在绿道网络。
【结论】构建了中心城区绿道智能选线方法,将居民真实活动轨迹融入空间要素分析中,融合居民出行行为特征与街道环境要素,通过量化评估方法为绿道选线规划和建设提供指导。
关键词
中心城区;绿道规划;智能选线;LSTM神经网络;时空行为;宿迁
文章目录
引言
随着城市居民对日常休闲健身活动和空间的需求提升,承载生态、休闲、文化功能的城市绿道日益成为健康导向下城市建设的现实需求。绿道作为线性的景观廊道,能够为人们提供休闲、游憩空间,保护景观连续性,提供动植物栖息场所,兼具游憩、教育、历史资源及生态保护等功能[1-2]。作为城市化地区生态修复的尝试,绿道建设需兼顾生态保护与绿地可实用性,可以满足市民日益增长的优美生态环境需要,有效助推城市高质量发展[3]。国外绿道建设除考虑人为使用外,更多凸显生态功能,而绿道在国内以提供交通、游憩功能为主,服务于具体使用者[4]。
因此,通过科学的绿道选线规划进而建设高质量的城市绿道系统,对于提升城市生态环境效益,满足人民群众游憩、健康等需求,具有重要现实意义。随着绿道建设的探索与实践,区域尺度的绿道系统规划方法相对成熟和完善,而中心城区绿道系统研究则处于探索阶段[5-6]。相较于区域绿道建设,中心城区人口相对聚集,建设用地制约明显,矛盾也相对突出,其绿道建设更要能满足居民日常使用需求,以提高城市活力和环境质量。
结合当前中心城区绿道选线和规划现状,本研究梳理当前绿道选线研究方法,以经典设计理论作为支撑,收集多源城市大数据,借助机器学习、人工智能算法,提出绿道选线分析框架。以宿迁市中心城区作为绿道选线案例地,本研究整合基础地理、POI(PointofInterest)、手机信令、街景、土地利用等多源数据,分析居民真实出行特征,多因子综合分析居民运动轨迹的真实倾向,进而模拟居民出行行为,提出中心城区绿道选线方法,提取潜在绿道网络,形成绿道选线规划方案。
1 绿道选线相关研究进展
1.1 研究进展
奥姆斯特德(F.L.Olmsted)在波士顿城市公园规划中提出的“parkway”成为美国绿道萌芽,“翡翠项链”式公园系统成为国际公认第一条绿道[1]。20世纪90年代Little[7]指出,绿道是沿着自然廊道、交通线路或其他线路的线性开放空间,是为慢行系统设立的自然或景观道,连接公园、自然保护区、文化景观或历史遗迹之间及其聚落的开放空间,包括其局部的公园道或绿带。目前绿道按功能主要分为3个类别:
1)具有重要生态意义的走廊和自然系统的绿道;
2)靠近水和风景的休闲绿道;
3)具有历史遗产和文化的绿道[8]。
21世纪初,绿道理念被引入中国,并在浙江、广东、北京等地开展了相关规划研究和建设实践[9-11]。
根据空间分布类型,绿道主要分为区域、城市和社区绿道3类,在实践中也可在城市和社区绿道间增加城区绿道[6]。本研究的中心城区绿道属于城区绿道,主要考虑城市环境内部,在供给端连接高级别的城市资源点(如区域性公园等),在需求端优先连接大型居住区等设施,空间载体为城市道路、河道水系及沿线线性绿地[6]。与区域绿道相比,中心城区绿道通常是慢行系统的重要载体[12],居民日常使用频率更高,对其需求也更高,可作为公共空间来激活片区,且中心城区绿道布局与空间环境紧密关联,受到空间制约,需要考虑的因素更多。
如何通过绿道系统的优化构建和慢行空间的提升打造,融合城市空间与生态空间,成为绿道系统规划面临的重要课题,因此国内外学者进行了大量实践探索。早期绿道研究主要集中在区域尺度的绿道系统,学者利用GIS路径分析方法,采用引力模型、成本距离模型等方法进行绿道选线。
如罗坤[1]结合徐汇区实际情况,借助成本距离模型评估区域内任意点到公共绿地、历史文化等设施的成本距离,判断绿道选线的可达性,进行绿道选线综合适宜性评估;周盼等[13]运用最小累积阻力模型和多因子叠加法,对绿道遗产保护、游憩可达性和生态保护进行适宜性分析,确定绿道选线;徐希等[14]从生态安全格局、资源分布和设施支撑对绿道选线进行综合评价,人工修正后确定绿道选线。
不同于区域尺度绿道选线,在城区尺度,学者以承载绿道的线性空间作为评价对象,分析道路的绿道建设适宜性,从而进行绿道综合选线。如李敏稚等[2]提出适宜性指标体系框架,运用成本连通性和成本距离工具进行分析和修正,构建广州历史城区绿道规划网络。王春晓等[15]考虑绿道适宜性影响因子,建立多源数据融合的绿道适宜性评价模型,提出城镇型绿道评价方法。
随着信息技术的更迭,大数据和机器学习等新技术为绿道研究提供了新的数据来源和分析方法。由于居民慢行活动数据能精准量化人对空间的实际使用,被广泛纳入绿道研究,时空行为分析、深度学习等方法被逐渐用在线路规划中。如徐欣等[16]借助GPS轨迹及图片数据,利用数据空间网格化、近邻分析等方法研究游客时空行为特征,为景区线路规划提供建议;叶宇等[17]、Tang等[18]采用层次分析法计算道路各因素权重,对绿道适宜性进行总体评分,提出绿道选线方案,并采用机器学习方法评价街道空间品质,提高绿道选线科学性;陈希希等[5]结合共享单车大数据,分析自行车高频使用空间,结合绿地价值和潜力分析,探索城市型自行车绿道选线方法,将高频使用的骑行空间和绿地空间纳入绿道体系。
1.2 研究述评
目前,国内外对于绿道选线规划的相关理论和实践研究较为丰富,先进理论和方法被引入绿道规划中。但当前绿道系统规划更多采用自上而下的分析视角,借助物理空间静态指标进行综合评估,聚焦于空间路径模型或绿道载体评价,在分析中较少考虑自下而上的人本视角和时空间行为分析方法,缺乏对居民在绿道中的行为方式研究,在方法上对于机器学习的应用仍然处于探索阶段。
因此,在多学科、多技术融合的背景下,本研究拟采集居民活动数据,通过时空间行为分析、机器学习等方法综合分析居民的真实出行倾向,剖析居民真实轨迹的相关指标变化规律,进而模拟居民出行行为并提出绿道选线方案,尝试提出一种中心城区绿道智能选线方法,推动绿道选线规划方法更新。
2 研究设计
本研究以5D理论作为依托,以时空行为分析方法作为支撑,采用LSTM(longshorttermmemory)神经网络方法对居民运动轨迹的指标变化规律进行模拟学习,预测居民在绿道中的行进规律。
2.1-5D设计理论及指标选取
随着空间品质成为城市设计重要目标,研究者尝试引入量化分析方法对其进行测度[19]。Ewing[20]在1997年提出3D模型,包括密度(density)、用地多样性(diversity)和设计(design),用以分析城市环境品质对交通行为影响。Cervero等[21]进一步增加目的地可达性(destinationaccessibility)与交通距离(distancetotransit)两个变量,提出5D理论,用以量化城市环境品质。
5D理论被广泛应用于城市建成环境品质测度,为高密度建成环境绿道规划和研究提供分析理论:一方面,已有研究借助5D理论测度绿道可建设性指标,开展绿道选线潜力评估[17-18];另一方面,研究者以5D理论作为评判绿道建成环境特征指标的理论基础,分析绿道建成环境对绿道中活动及活动多样性的影响[22-23]。
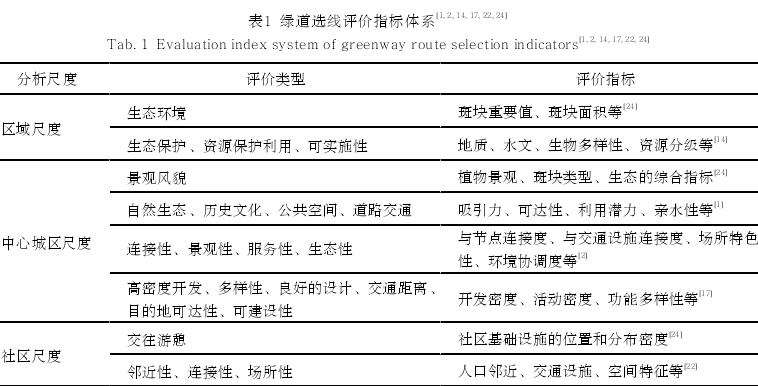
通过对国内外相关研究进行检索和综述,综合考虑既有研究的绿道选线评价指标体系(表1),本研究构建基于5D理论的绿道分析的指标体系,共包含人口密度、POI设施密度、POI设施混合度等共10个绿道体系测度指标,可归纳为密度、多样性、设计、目的地可达性、交通距离5类绿道体系测度类型。
2.2 技术路线
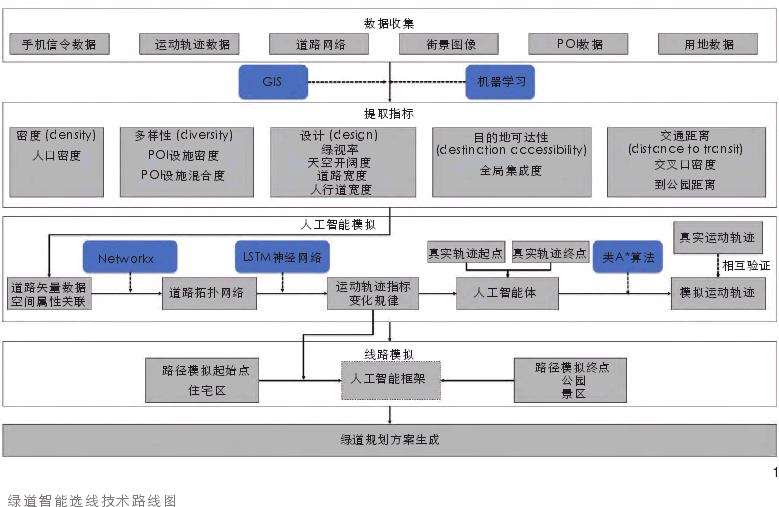
本研究依据研究问题和理论确定了绿道智能选线技术路线(图1)。首先,收集手机信令、运动轨迹、街景、道路网络等数据构建现状数据库;其次,结合GIS、时空间行为分析、机器学习等方法,提取所有道路5个维度共计10个指标;再次,提取运动轨迹所经过的道路及次序信息,将相应的各道路互通关系转换为人工智能框架能够识别的Networkx库格式,采用LSTM神经网络算法训练得到运动轨迹不同指标变化规律,将真实轨迹起点和终点输入人工智能体框架,采用类A算法模拟得到运动轨迹并与真实运动轨迹进行验证对比;最后,提取绿道选线的起始点和终点,将其输入到训练的人工智能框架,得到模拟的居民出行线路,识别出高频次出行线路作为绿道选线规划的依据,最终形成绿道规划方案。
3 研究方法与数据
3.1 研究方法
3.1.1 研究对象
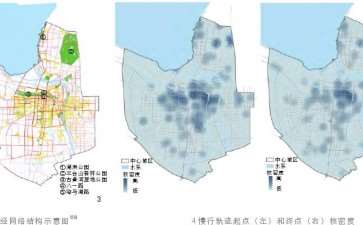
宿迁位于江苏省北部,是全省最年轻的城市,近年来创建国家生态园林城市,坚持生态立市发展战略,全面推进国家森林城市建设。考虑到宿迁生态本底良好,地势平坦,且中心城区尺度大小合适、绿道建设条件较好,因此本研究选择宿迁中心城区为研究对象。宿迁中心城区总面积约359.32km2,是宿迁城市的核心载体,也是全市的政治、经济、文化、交通、金融中心。
3.1.2 时空间行为分析方法
20世纪60年代中后期,强调个体和微观时空过程的时间地理学、行为主义开始发展,奠定了时空间行为研究的理论基础[25]。时间地理学将时间和空间在微观个体层面相结合,通过时空棱柱、时空路径等概念及符号系统构建理论框架[26],其核心思想是满足个人需求的活动和事件具有时间维和空间维[27]。目前,居民的时空间行为研究正在逐渐从传统问卷调查或访谈方法转变为利用GPS、移动互联网等新技术手段获取研究数据,呈现出研究方法科学化、研究对象个体化、研究主题应用化等趋势。
20世纪60年代中后期,强调个体和微观时空过程的时间地理学、行为主义开始发展,奠定了时空间行为研究的理论基础[25]。时间地理学将时间和空间在微观个体层面相结合,通过时空棱柱、时空路径等概念及符号系统构建理论框架[26],其核心思想是满足个人需求的活动和事件具有时间维和空间维[27]。目前,居民的时空间行为研究正在逐渐从传统问卷调查或访谈方法转变为利用GPS、移动互联网等新技术手段获取研究数据,呈现出研究方法科学化、研究对象个体化、研究主题应用化等趋势。
3.1.3 LSTM神经网络模拟方法
本研究拟采用机器学习中深度学习的方式,根据居民的运动轨迹寻找出道路各指标的变化规律。常用方法模型是深度学习中的循环神经网络模型,这是一类以序列数据为输入,在序列的演进方向进行递归且所有节点按链式连接的递归神经网络[29]。但循环神经网络仅能够记忆轨迹中短期的指标变化规律,并不适用长期记忆,因运动轨迹较为密集,需要长时记忆,故本研究使用LSTM神经网络,以解决长时依赖问题[29]。LSTM神经网络通过对规律的长期记忆,最终输出变化规律。
ctLSTM神经网络每一个循环单元有一个额外的记忆状态和若干控制信息流的门,包括输入门、记忆门、遗忘门和输出门,可以对长时间跨度的信息进行阈值筛选并选择性记忆。LSTM神经网络计算式如下[30]:htxttft、it、ot、ctt?ctσ(·)tanh(·)式中:为隐含状态,为时刻的输入,分别为时刻的遗忘门、输入门、输出门和记忆状态向量。为记忆更新向量;表示Sigmoid函数,为双曲余W、Ub⊙ytt弦函数;表示权重矩阵;表示偏置向量;表示向量标量积,为时刻的输出。ctct
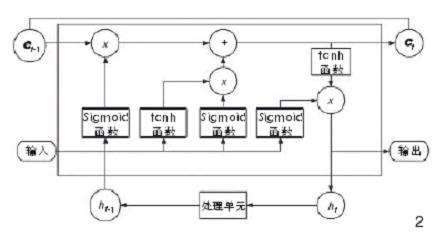
ctct?1本研究在LSTM神经网络中输入不同滞时的序列(即不同道路指标值序列),通过输入门、遗忘门和输出门调整循环单元的记忆状态向量与隐含状态向量,进而实现长短期记忆及序列预测。为使LSTM神经网络发挥有效学习能力,可通过循环单元中的记忆状态向量,借助阈值设置与前序列单元的传递,将前序输入信息有选择性地长期保留,而遗忘门则控制前一时刻的记忆状态向量中哪些元素会被遗忘。LSTM神经网络中记忆状态向量和隐含状态向量的长度可以指定,且多个LSTM网络层可以相互叠置,需按照输出的格式在最后时刻添加相应的密集层(也称全连接层,图2)。
LSTM神经网络的具体设置参数必须在预先设计好之后,通过一定次数的测试和训练才能够得到最适合的值。
3.1.4 类A算法路径模拟
本研究的人工智能框架指的是能够将需求使用在已加载了智能体及相关算法的结构中,只需输入起终点即可自动运行相关算法进行最优化路径选择。A算法是启发式搜索算法之一,被广泛应用于路径优化领域,通常用于计算最短路径,是路径叠加计算的最小值。它的独特之处是在检查最短路径中每个可能的节点时可引入全局信息,对当前节点距终点的距离做出估计,并作为评价该节点处于最短路线上的可能性的量度。
本研究采用改进的类A算法,计算利用变化规律预测出的值与实际值之间的Pearson相关系数,并利用相关系数反算出离散系数,加权求和的最小值即为与预测最佳值相差最小的最优路径。
3.2 数据收集与处理
本研究数据主要来源于土地利用数据、运营商数据、网络公开数据等渠道,包含用地、道路、设施、街景图片、手机信令等数据类型。其中用户运动数据来源于六只脚运动轨迹网站(www.foooooot.com),提取研究范围内慢行活动的GPS出行轨迹,按照时间顺序生成轨迹;道路数据、POI数据来源网络地图PI(Applicationprogramminginterface),利用GIS软件形成矢量数据,并基于分类字段及城区公共服务设施名录对获取到的POI数据进行筛选,按照商业设施、公共服务设施、风景名胜等进行重分类;手机信令数据来源于通信运营商,将手机信令数据聚合到网格中;街景图片数据来源于网络地图API,以矢量路网为底图,每隔50m设置一个街景采集点,采集沿路方向和垂直道路方向共4张街景图片;用地数据来源于第三次全国土地调查的结果,包含耕地、种植园用地、林地、草地等多种地类分布情况;自然生态、休闲游憩、历史文化等资源名录来源于调查数据,通过地址解析进行空间落位。
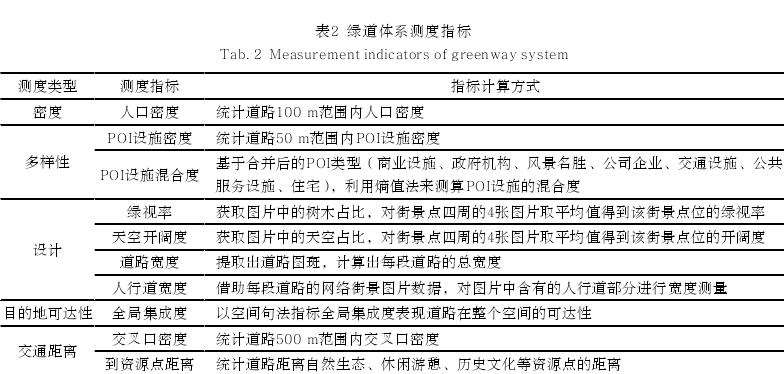
数据收集、清洗、存储后,通过指标计算形成绿道体系测度指标(表2),再将其与道路进行空间链接,得到各指标空间分布图。