基于全景图的城市街道视域景观指数计算与邻里尺度特征效应研究
摘要:本文探讨了基于全景图多格式数据计算城市街道视域景观指数的方法,分析了关键点邻域尺度区间频数在识别街道特征中的可行性。通过引入邻里尺度特征效应,研究了空间尺度配置对街道绿化聚类区划及15min步行生活圈信息熵的影响。结果表明,视域景观指数随空间尺度增加表现出明显的尺度依存特征,为城市街道空间的景观质量提升、量化管理和微更新提供了科学的评价途径与参考依据。
关键词:全景图;视域景观指数;尺度效应;街道空间;聚类分析;信息熵
3.1 基于全景图不同数据格式计算城市街道视域景观指数
Ye等在测量街道空间绿视率时,抓取谷歌街景水平视点4个方向上的图像作为图像分割数据[24];Tang等下载腾讯地图街景图像做图像分割,计算对象比例[17]。而使用全景图的不同数据类型分别用于不同类型指数的计算,可以进一步提升指数计算的精度:将等量矩形投影图用于色彩丰富度指数、关键点邻域尺度区间频数的计算;极坐标格式全景图用于天际线变化指数的计算;立方体格式全景图用于街道空间对象视域占比指数测量。
3.2 关键点邻域尺度区间频数应用的可行性
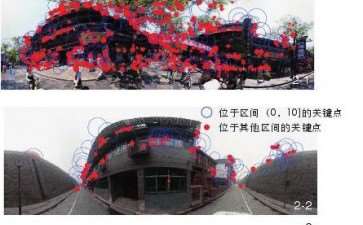
图像匹配是应用计算机视觉解决许多问题的一项基本研究,包括对象和场景识别、多个图像中寻找三维结构和运动追踪等。Lowe提出的尺度不变特征转换,可以不受图像变形、噪声等影响,有效提取图像的特征[33]。为进一步提取城市街道空间不同属性的特征,依据尺度不变特征转换关键点描述子定义关键点邻域尺度区间频数指数。所有街道特征指数聚类贡献度结果进一步证明了关键点邻域尺度可以作为城市街道空间重要特征之一,通过确定相应关键点邻域尺度区间频数大小,能够有效识别不同特征的城市街道区域。
3.3 视域景观指数受不同邻里尺度的特征效应影响和应用示例
大量研究证实,地理学研究对象格局与过程的发生、时空分布、相互耦合等特性都是尺度依存的(scale-dependent)[34],例如韩贵锋等在地表温度与植被指数相关性的空间尺度特征研究上,选取了30~8000m之间变化间隔的9个空间尺度[35]。但是受到数据可获取性、数据分析方法和技术要求等各类因素的限制,对于涉及尺度相关的研究问题或采取定性分析,或选取一个到多个非连续的部分尺度进行数据分析。
在空间尺度配置的对象上,可初步分为2种情况:通常情况是对研究范围精细度的划分,例如以30或60m单元格划分研究范围,每一单元格为最小研究对象[35];再者是分析对象各个空间点的缓冲距离或者邻元数。不同空间尺度配置方式会对结果造成影响,例如空间异质性基于前者通常随尺度增大而降低;而基于后者,通常随尺度增大而增大。
3.3.1 通过不同空间尺度聚类区划研究对象
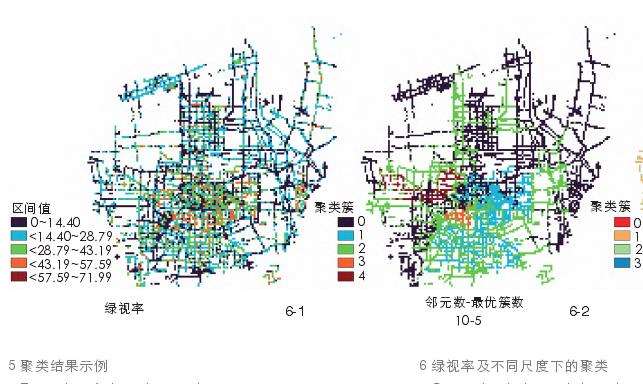
在研究城市街道绿化时,通过绿视率量化的常规区间分区(图6-1)不能很好分区实现精细化管理,但可以通过聚类的方法尽量将绿视率接近的位置归为一个区域,便于宏观统筹(图6-2~6-4)。

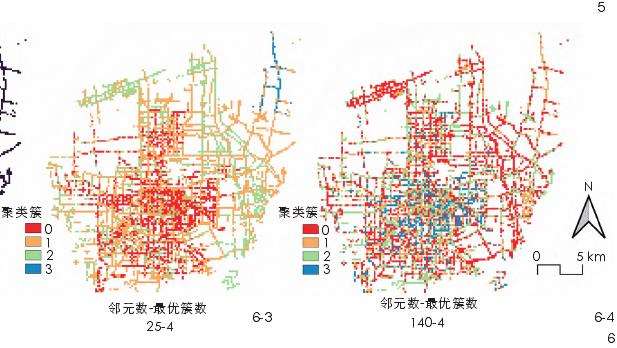
从箱型图(图7)观察10-5(邻元数-最优簇数)聚类结果的分离性,除簇1和簇4之外,分离性均较好。虽簇1和簇4具有类似的聚类特征,但是2个簇类分别位于不同的区域,表明这2个不同区域具有类似的绿视率指数特征。同时比较了邻元数与最优簇数为25-4和140-4的绿视率指数单独聚类结果,表明如果考虑的邻元数增多,尺度增加,则区域细化程度升高,即空间异质性增加。
3.3.2 不同空间尺度15min步行生活圈的熵值变化
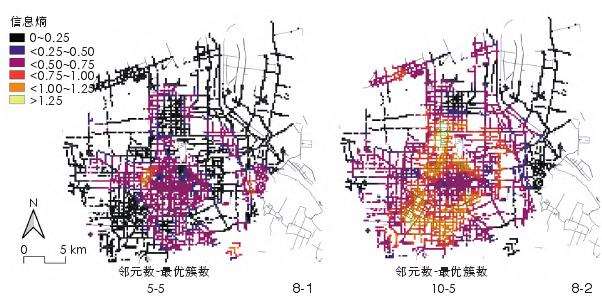
计算多指数聚类特征15min步行生活圈(半径约1100m)的熵值结果(图8),分析邻元数分别为5、10和30下的多指数聚类特征信息熵分布。从结果来看,随空间尺度的增加,信息熵整体增加,即空间异质性增加。统计所有采样点各个邻里尺度下信息熵值分布与特征簇类数量的关系,其结果为:当簇类数为2时,信息熵值域为[0.027,0.693];为3时,值域为[0.112,1.099];为4时,值域为[0.336,1.386];为5时,值域为[0.778,1.607]。由此可见虽然各特征簇类数量的信息熵值域是相互交错的,但从基本趋势可以判断较高的信息熵相对具有较多特征簇类,反之具有较少特征簇类。多指数聚类特征信息熵的高低一定程度上反映了城市活力的高低或城市风貌多样(混杂)程度,对城市空间序列、风貌景观组织优化、城市视觉等区域控制具有参考价值。
同时,单独提取了城市中的5个位置点,分别为西安建筑科技大学西门、钟楼、大明宫南门、西安北站和曲江立交。观察各个位置点信息熵随邻元数变化趋势(图9),结果表明:西安建筑科技大学西门、钟楼、大明宫南门均位于二环以内较为繁华区域,较之位于偏远区域的西安北站和曲江立交具有更高的信息熵;可以观察到各位置点均表现出尺度依存的特征,信息熵随邻元数增加而逐渐增加,当邻元数约为30~50时趋于平稳。因此在平稳状态下分析比较不同位置点视域景观指数聚类信息熵,可以较为准确地观察城市街道视域景观丰富程度的变化特征。
3.4 局限性
PASS全景图语义分割的均交并比(mean intersection-over-union, mIoU)约为54.3%,全景图的分辨率为1024×512px,同时用于拍摄全景图的车辆占据了地面较大的空间,均会在一定程度上影响图像语义分割和特征指数计算结果的精度。区域尺度全景图是沿道路每200m设置一个采样点,较大距离的采样点对区域尺度的特征指数聚类和特征的具体分布有一定程度影响。上述对分析结果精度有影响的因素无法完全避免,但是未来可以尝试增加密集的采样点,并通过算法的改进和方法的调整使精度进一步提升。
同时,百度地图全景静态图各个节点拍摄时间存在差异,也并未提供具有时间序列的历史图像,限制了城市街道特征时间轴向的分析。
4 结语
本研究以全景静态图数据为分析的基础,通过当前计算机视觉发展的相关算法,解析反映城市街道的图像内容,包括语义分割、尺度不变特征转换来计算绿视率、天空开阔度、地面视域占比、视觉(熵)均衡度、色彩丰富度指数,及天空形状的周长面积比、形状指数和分维数,并提出关键点邻域尺度区间频数等指数。
应用能够反映城市街道特征的视域景观指数,由层次聚类连接矩阵的邻元数变化作为空间尺度配置方式,探索不同邻里尺度下视域景观指数聚类后的特征空间分布变化及指数贡献度;并列举空间尺度变化下,基于单指数绿视率的特征区域提取和多指数聚类信息熵的特征分布变化,表明对城市街道视域景观指数和邻里尺度特征效应的分析,可以为城市街道空间的景观质量提升、量化管理和城市微更新提供参照。
基于城市街道视域景观指数分析城市街道特征分布是对城市街道建成环境的一种评价途径,在进一步的研究中,可以结合百度地图应用中的兴趣点(point of interest, POI)数据,由协方差逆矩阵和AP聚类算法(affinity propagation, AP)计算分析行业分类服务的业态空间分布结构,或计算POI密度曲线,以自然断点法分类识别城市活力中心[36]。通过耦合建成环境街道特征分布和反映城市生活的业态空间分布及活力分布,能够提取综合的城市街道特征空间模式,权衡建成环境和生活服务的匹配关系。