盆栽系统的3个组成和工作原理
访问量:11
盆栽系统的组成和工作原理
回转式一串红盆栽机构是盆栽系统中最重要的工作部件,但仅依靠盆栽机构,还不能实现一串红钵苗盆栽的自动化。因此本文设计了一整套的盆栽系统,如图 2-2 所示。该系统主要包括秧箱部分,盆栽机构部分和输送部分。盆栽系统中,各组成部分的主要功能如下。
(1)秧箱部分:秧箱的作用是盛放一串红钵苗,同时还要实现输送秧苗[36]。将穴盘放置在秧箱上,盆栽机构完成一次取苗后,秧箱横向移动,将穴盘中未盆栽的钵苗移动到取苗的位置。当盆栽机构完成穴盘中一行秧苗,穴盘整体向下移动,将下一行钵苗输送到取苗的位置。
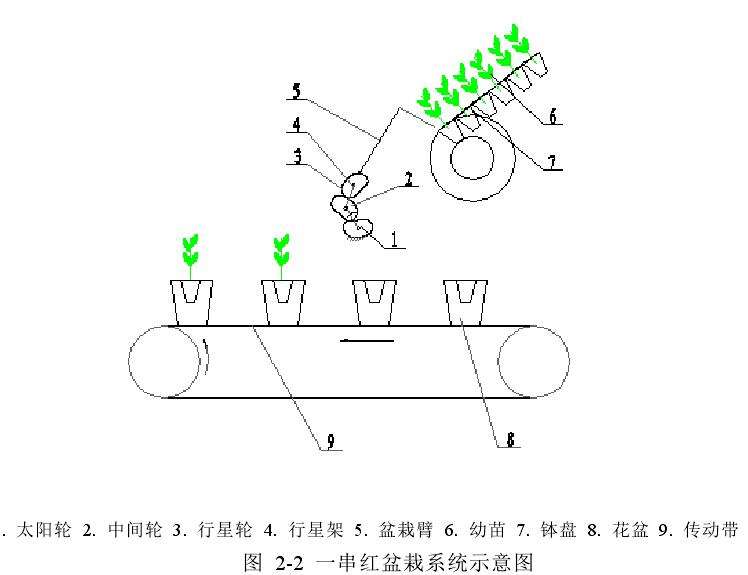
(2)盆栽机构:盆栽机构的主要功能是完成取苗、输送和栽植三个动作。其具体工作原理会在下文中介绍。
(3)输送部分:将空花盆输送到栽植位置,并将完成栽植的花盆。输送部分主要依靠带传动来完成。本文选取摩擦型传动的方式,因为其传动较为平稳[37]。
其中,盆栽机构主要由行星轮系、盆栽臂和取苗装置等组成。行星轮系包括太阳轮、中间轮、行星轮和行星架;盆栽臂包括凸轮和拨叉等;取苗装置包括推秧杆、滑道和取苗片。太阳轮与机架固接,盆栽臂和行星轮固接,取苗装置的末端和盆栽臂固定。
盆栽机构工作时,行星架逆时针转动,齿轮啮合传动,行星轮带动盆栽臂和取苗装置转动。当取苗装置运动到距穴盘最近的取苗位置时,凸轮带动拨叉运动使推秧杆顶出,从而带动取苗片沿滑道运动,取苗片以固夹角扎入土钵完成取苗动作,过程如图 2-3 所示。
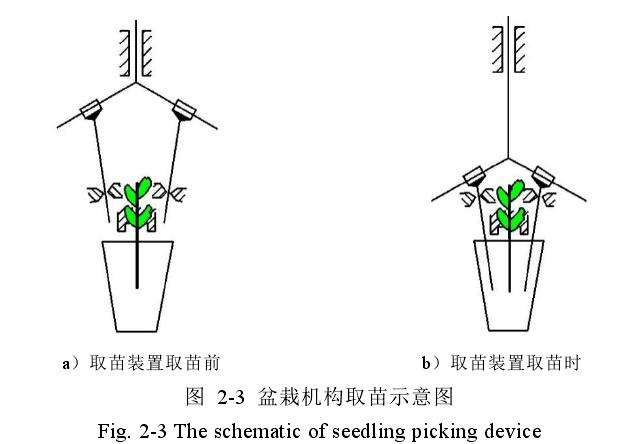
行星架继续转动,当取苗装置运动到距花盆最近的栽植位置时,凸轮回程,推秧杆收回并带动取苗片缩回,花卉钵苗在重力的作用下落入花盆,完成栽植动作。传送带连续转动,将栽植好的花盆输送到一端并取下,如此循环完成花卉的盆栽。机构运转一周完成一次盆栽过程,通过调节机构的转速和传送带的速度来确定花盆的放置位置,以保证花卉钵苗能准确落入花盆中。