国外花卉移栽机技术现状:VISSERTTA与Delta机器人移栽性能对比分析
摘要:本文系统综述了国际先进花卉移栽技术的研究进展,重点分析了荷兰VISSER PC-16型、TTA FlexPlanter、澳大利亚XT616型以及基于Delta并联机器人的自动移栽机构。文章探讨了气动驱动、视觉识别剔除、PLC控制以及并联机构在农业自动化中的应用,并针对国内生产模式分析了现有高端装备在成本与通用性方面的局限性,为国产花卉移栽机的研发提供了参考。
关键词:花卉移栽机;VISSER;TTA FlexPlanter;Delta机器人;农业自动化;取苗机构
荷兰VISSER开发的PC-16型花卉移栽机
荷兰VISSER开发的PC-16型花卉移栽机如图1-2所示,其工作过程如下:电磁阀作用于气缸的阀门,而取苗的执行部件杆机构由气缸驱动[10,11]。机构工作时,在气缸的作下,带动杆机构将秧苗从穴盘中取出,取出秧苗后,将秧苗栽植到花盆中,从取苗到栽植这一输送过程中,输送带保持静止不动,当栽植动作结束后,输送带开始运动带动花盆移动到上一组花盆所在的位置。
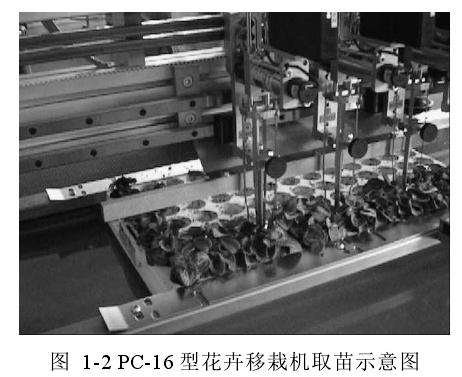
该机器工作时,每个移栽爪的移栽速度为20次/min,为了提高移栽的效率,需增加移栽手爪的数量。该机构性能通用性差,只能对符合栽植要求的秧苗进行作业,不能应用于不同类型的作物和不同类型的秧盘。该机构主要应用于大型集约化农业生产模式,与国内现阶段设施农业生产模式适应性较差。整套装备价格昂贵,国内大部分花卉、果蔬生产基地都无法承受其高昂的费用。

荷兰研发的TTAFlexPlanter移栽机
荷兰研发的TTAFlexPlanter移栽机[12,13],同样是从垂直方向夹取幼苗,如图1-3所示。与VISSER移栽机械不同,该机器结合了视觉识别系统,通过识别系统判断秧苗的生长情况,可以在移栽的过程中剔除长势较差的幼苗,不合格的幼苗直接进入垃圾传送带。该设备省去了人工筛选秧苗质量的步骤,节省了人力。
澳大利亚XT616型移栽机
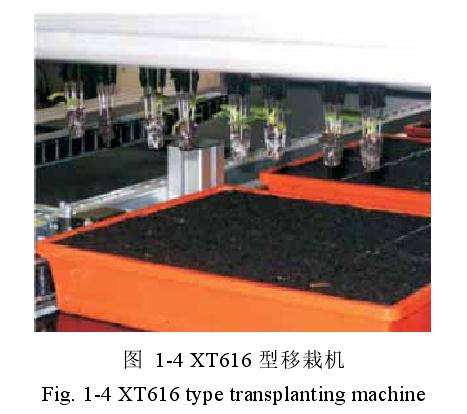
XT616型移栽机由澳大利亚的TransplantSystems公司研制[14,15],如图1-4所示。其移栽的主要对象是茶叶的幼苗,该机器同样采用PLC等来控制末端执行器夹取秧苗,其优势在于,该机构配套不同规格的机械手,可以针对不同大小的茶叶幼苗进行移栽。
并联Delta机器人及其在花卉移栽中的应用
随着机器人技术的成熟,国外也出现了基于三平移并联Delta机器人[16,17],如图1-5所示。并在此基础上开发了花卉自动移栽机构,在Delta机器人的动平台上安装机械手,如图1-6所示。该自动移栽机构能在视觉系统辅助下捕捉幼苗和空盘,由三个并联的伺服轴驱动动平台带动机械手运动,从而实现自动化的移栽花卉幼苗过程。

Delta机器人具有重量轻、运动速度快、效率高等优点[18,19],目前主要应用于食品、药品和电子等产品的加工和装配。由于农业作业对象不同于工业产品,生物体物理特性和力学特性存在差异,机器视觉检测定位的难度大,导致机械手夹取过快也会导致成功率下降,机器的效率和成本优势在花卉移栽上无法体现,该种机器人移栽机在花卉行业尚处在研究进程中、还未广泛推广。
取苗工作核心机构研究
在完成穴盘苗取苗工作核心机构研究方面,日本学者研究了滑道—行星轮系组合取苗机构、韩国开发了滑块五杆取苗机构[20,21],这两种机构采用单自由度机械传动,机构的结构简单,工作可靠,机构取苗效率可达40~50株/min,但由于机构的构型限制了工作效率的进一步提高。


