基于点云与ArcGIS的景观视觉特征量化分析 | 以南京情侣园为例
从视点到空间:基于点云的景观空间视觉特征量化分析方法
摘要
【目的】景观空间视觉特征是衡量景观空间品质的重要标准之一。过往基于三维模型、二维照片的分析方法难以兼顾对视觉界面平面维度与纵深维度空间信息的量化分析,对于较大尺度的城市公园空间视觉特征研究与设计实践的适用度较低。对景观空间视觉特征进行量化分析有助于设计师认知场地空间形态的关键特征。
【方法】提出一种将点云可视化技术与ArcGIS空间分析相结合的方法,包括点云模型数据获取与处理、空间单元划分与视点生成、人群视觉模拟与特征指标计算、空间单元视觉特征可视化与分析4个步骤。借助该方法,以南京市情侣园为例,选择延伸度、开敞度、复杂度、绿视率和天空率5个视觉特征指标进行量化分析。
【结果】空间单元内部不同位置的视觉特征指标数值差异可能与单元内要素的空间分布特征存在联系。空间单元中心视点的视觉指标计算结果在反映单元整体的视觉特征上存在一定局限。
【结论】相较于过往的分析方法,该方法能够更加全面和直观地展现多种视觉特征指标在空间中的数值分布及连续变化情况,且具有综合分析多个指标的潜力。该方法在探究景观空间的视觉特征与人群行为偏好间的关联机制、预测人群行为活动等领域具有一定应用前景。
关键词:点云可视化;景观空间;视觉特征;量化分析;城市公园;ArcGIS
城市绿地作为城市公共开放空间的重要组成部分,是城市居民接触自然环境、进行日常户外活动的主要场所,对人们的健康和福祉起到了积极的促进作用[1]。城市绿地空间品质是决定空间吸引力及服务功能能否实现的重要因素[2]。景观空间视觉特征作为衡量景观空间品质的标准之一,对其量化分析方法的深入探究有助于辅助设计师精准认知景观空间的形态特征,为高品质景观空间营造提供支持。
1 景观空间视觉特征研究现状与局限
1.1 景观空间视觉特征研究进展
景观空间视觉特征用于描述与人视觉感知相关的景观空间形态特征。对于人在环境中感知到的全部信息中,视觉感知占80\%。已有学者对景观视觉特征与人群感知之间的关联机制展开了大量研究,提出了描述视觉景观特征的不同评价指标,并证实了景观空间视觉特征对于预测人群对特定景观空间的偏好度以及潜在活动行为起到的重要作用[3]。如Grahn等[4]提出了感知感官维度(perceivedsensorydimensions,PSD)理论,包含自然、场景、庇护、空间等8个感知维度。Tveit等[5]提出了“理论—维度—度量”的研究框架,并从9个维度对景观空间视觉特征进行归纳总结。其中,与景观三维空间特征相关的维度有自然性(natural)、复杂性(complexity)、一致性(coherence)和视觉尺度(visualscale)。自然性即景观自然特征属性,Purcell等[6]、Gobster等[7]将自然性视为视觉质量的关键因素,相关指标包括绿地率、水面率和绿视率等。复杂性体现了空间的视觉丰富性,相关指标有要素丰富度、景观形状指数、异质性指数等[8-9]。一致性即人视野范围内空间要素间的连贯程度与和谐程度,一致性较高的空间具有较强的秩序感和引导性[10]。视觉尺度能够描述景观空间的可见性和开阔度,指标包括天空率、开阔度、可视范围等[11-12]。人们对于具有适宜尺度和开敞度的景观环境偏好度更高,这类环境能够为人们提供良好的社交场地,促进居民户外活动与社会交往[13]。
近年来,随着人本主义理念与设计的不断发展,在城市公共空间设计中,设计师对于人群实际体验、与环境的互动以及潜在活动预测的关注度逐渐提高[8]。过往大量研究证实了景观视觉特征与人群的感知偏好、人群活动以及心理压力缓解等存在关联[14-15]。景观空间视觉特征为预测人群活动偏好提供了可能[16]。因此,对景观空间视觉特征的深入探讨,不仅有助于设计师认知场地空间与视觉的关键特征、评估景观视觉质量,也能够为景观规划设计、管理决策以及相关政策制定提供帮助[17]。
1.2 景观空间视觉特征的量化分析方法
伴随着景观空间视觉感知研究的不断深入以及新技术的出现,景观空间视觉特征的量化方法也不断发展。早期学者通过卫星遥感图对景观空间视觉特征进行评估,然而这种低精度的量化方式无法真实反映人的实际视觉感知情况。目前常用的2种方法是二维实景照片分析和三维模型视觉模拟。
二维实景照片能够直观展现视觉界面横向维度的要素构成,且获取方式较为便捷。随着机器视觉以及深度学习等技术的发展,通过语义分割、深度分析等方法对照片进行处理能够精确划分视觉界面要素以及计算部分纵深维度的特征指标,上述方法常应用于街道、滨水等景观的视觉质量研究中[18-19]。相较于普通照片,全景照片能够涵盖视点全方位的空间信息,近年来学者们利用全景照片对城市开放空间的视觉特征与空间质量进行分析与评价[20-21]。三维模型视觉模拟能够弥补照片在三维空间指标分析上的局限,可分为2种操作方法。
1)在确定视点后,构造视线或视锥,结合视线或视锥的三维形态特征以及与空间要素的关系,分析视野的深度、绿视率、可视空间等[11,22]。该方法在城市视觉景观分析与评价中被广泛使用,如天空率、空间开放指数等成为测量三维空间信息的重要指标。
2)通过模拟视点的视觉界面,将空间要素的空间信息转化为视觉界面像素的属性值[23-24]。该方法不仅能够分析视觉界面中的要素构成及占比等指标,也能够通过像素的色彩值展现空间纵深方向的信息。
1.3 研究面临的挑战
过往景观空间视觉特征的研究往往选取空间单元的中心视点进行量化分析,结果能够反映空间整体的视觉特征[22]。然而,人在景观空间中往往处于运动的状态,对景观空间的实际感知是在不同位置感知到的信息的叠加。因此,识别出景观空间视觉特征在不同位置的连续变化特征,对分析人在空间中的实际视觉体验具有重要价值。
mapping①是一种能够可视化描述景观环境空间视觉属性的分析方法,在景观空间品质和特征评估、可视化展示等方面,以及交互设计、虚拟现实等领域得到广泛应用[25]。然而,目前景观空间视觉特征的mapping分析方法在辅助设计实践方面仍然面临挑战。方法主要分为2种:利用三维模型对多个视点可视域的叠加分析、对多个视点二维照片要素特征的分析。
空间三维可视性特征分析有助于设计师对景观空间的视觉关系以及空间品质进行评价[26-27]。然而该方法难以对不同视点所对应的视觉界面要素构成特征进行分析,如绿视率指标等。二维照片与人在景观空间中的视觉界面相近,有学者尝试获取不同位置的全景照片,对多视点图像进行指标计算,并在ArcGIS等平台中生成城市绿地的视觉特征栅格[20]。
然而二维照片在分析三维视觉指标(如空间深度特征等)方面存在缺陷;并且二维照片难以直接转为空间模型进行编辑。Zhang等[28]在Rhino软件中构建了三维模型,通过生成多视点视觉界面对城市公园视觉特征进行mapping分析,但模拟结果的精度受到粗糙植被模型的限制。点云模型能够精确记录并展现真实景观环境的空间信息,便于进行编辑与处理,近年来在景观空间形态量化领域被广泛关注,并产生了利用点云模型进行景观视觉分析的方法研究[11,22]。
然而在基于点云体素化的量化方法中,较小的体素可以反映环境中的细节,但需要较长的运算时间。因此该方法目前往往被用于空间单元单一视点的分析中,对大尺度城市绿地景观空间视觉特征进行mapping分析仍存在一定的困难。
基于此,本研究在过往景观空间视觉特征量化方法的基础上,尝试提出一种基于点云模型以及视觉成像算法的景观空间视觉特征量化方法。该方法在保留点云模型高精度空间信息的基础上,具有较高的运算效率,且能够满足对二维和三维视觉特征进行量化分析的需求。本研究以南京市情侣园的4个景观空间单元为例,验证这一方法的可行性,并对选取的景观空间单元的视觉特征进行初步分析。
2 研究方法
2.1 技术路径
本研究在过往景观空间形态量化研究的基础上,将点云可视化技术与ArcGIS中的空间分析功能相结合,利用三维点云模型空间数据精度高以及视觉模拟便捷等优势,模拟景观空间多视点的视觉界面,计算多种视觉指标,实现对景观空间视觉特征指标的计算与可视化展示。该方法主要分为4个步骤:点云数据获取与处理、空间单元划分与视点生成、人群视觉模拟与特征指标计算、空间单元视觉特征可视化与分析。
2.2 点云数据获取与处理
考虑到仅需要完整的要素表面模型即可对视觉界面进行模拟,本研究通过无人机(unmannedaerialvehicle,UAV)倾斜摄影技术获取场地空间数据;对于郁闭度较高区域难以获取的地面空间数据,通过人工拍摄照片补全。在ContextCapture软件中生成完整的三维模型后,导出点云格式模型。为满足后续多视觉指标分析的需求,将点云模型的要素分为乔灌木、地被、草坪、硬质地面、水面、建筑、其他7类,分别赋予不同颜色,作为后续分析的基础。再利用TrimbleRealworks软件中的室外点云分类工具对点云模型自动分类,并进行人工校准与二次编辑,以保证最终分类结果的准确性。
2.3 空间单元划分与视点生成
视点是模拟视觉界面的基础,本研究利用ArcGIS中的创建渔网工具生成视点阵列。由于该工具在分析时需要数据有明确的空间边界,而城市绿地开放空间中较少存在明确的空间分隔,因此本研究中样本边界的确定往往基于人为判断。本研究借鉴过往学者提出的景观空间单元概念对样本边界进行判断。景观空间单元作为城市公园中由要素围合限定形成的可活动的、不可再分的单一独立空间,在结构上具有可识别的围合边界[29]。
另外,本研究识别出空间中的竖向要素和界面来辅助空间单元边界的判断。参照过往景观空间单元的提取方法,在ArcGIS中对点云模型栅格化并进行坡度分析,以坡度突变处作为线性要素边界,并依据人眼1.5m高度的视线是否被界面遮挡来识别与划分空间单元。在确定空间单元平面后,利用ArcGIS创建渔网工具在空间单元内生成视点阵列来表示人在空间中的位置。
通过控制点与点之间的距离来控制视点密度。视点间的距离需根据空间单元尺寸以及研究结果的精度设置。最后,人工调整与空间要素重叠、在单元边界附近或人无法步行进入的区域的视点。
2.4 人群视觉模拟与特征指标计算
利用开源C++编程库点云库(PointCloudLibrary,PCL)中的可视化(visualization)和深度图像(rangeimage)功能,模拟每一个视点对应的二维视觉界面,并通过二维图像的像素颜色与对应数值展现视觉界面的要素信息和空间深度信息。通过模拟每一个视点的全景视图,即水平方向视角设为360^\circ、竖直方向视角设为120^\circ,表现人在景观环境中漫游状态下看到的空间界面,可得到深度图像和色彩语义图像,进而提取二维图像每个像素点对应的深度数值与语义数值。在得到每一个视点的全景视觉界面模拟结果后,即可对各视觉指标进行分析。
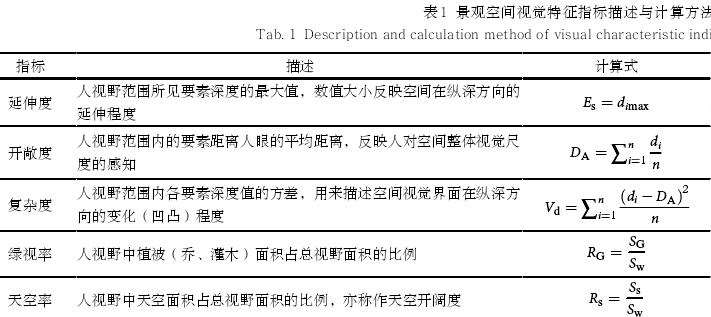
本研究选取过往景观空间视觉特征研究中常见的5个指标进行量化分析:延伸度、开敞度、复杂度、绿视率、天空率(表1)。
2.5 空间单元视觉特征可视化与分析
计算每个视点的视觉特征指标后,在ArcGIS属性表中为视点对象添加对应的视觉指标属性字段,将计算得到的各指标数值导入属性表中。利用ArcGIS中的克里金插值工具生成各指标的彩色栅格图。后续可根据研究需要,对各指标栅格重分类,并利用ArcGIS中的加权叠加功能对多个视觉指标进行综合分析。
3 城市公园景观空间单元视觉特征量化
3.1 案例选取
为验证本研究提出的方法在城市公园景观空间视觉特征研究中运用的可行性,选取南京市情侣园作为研究案例进行方法检验。情侣园是20世纪80年代建设的城市综合性公园,占地面积为30hm^2。公园内植被覆盖率高,空间形态变化丰富,是周边居民日常健身游憩的热门景点。研究此类建设年代较久远的城市公园的景观空间视觉特征,有助于管理者与设计师评估公园内部空间质量以及充分了解人群在公园中的活动体验情况,为公园空间更新与提升提供帮助。本研究在晴朗、少云、无风的天气下,利用无人机倾斜摄影技术获得场地点云模型,并进行要素分类。
3.2 空间单元划分
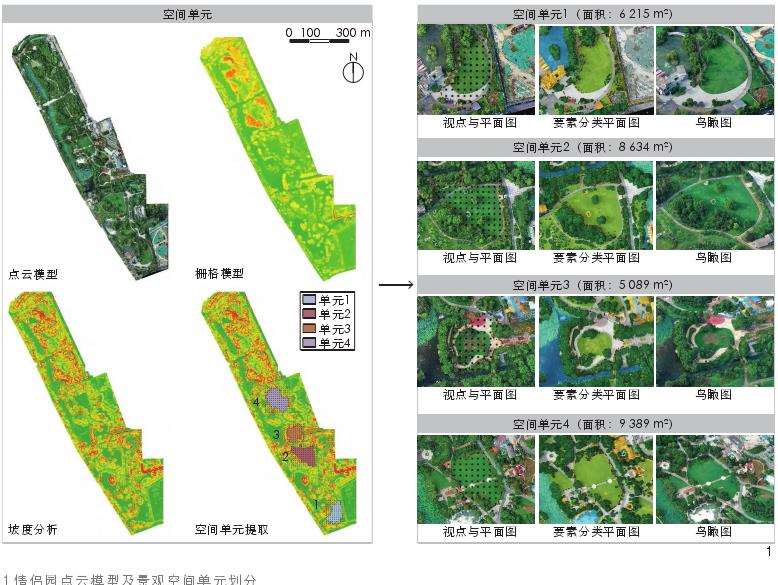
利用ArcGIS的坡度分析工具对情侣园的空间单元进行识别,共提取出4个面积大于0.5hm^2的空间单元作为研究对象(图1)。4个空间单元分布在情侣园的中部和南部,是人们日常活动较为集中的开放空间。以10m为间距生成视点阵列,并根据场地实际情况对视点进行局部调整。
3.3 空间单元视觉特征量化

在模拟各视点的视觉界面后,计算其视觉特征指标数值,通过栅格图的色彩差异展现各指标数值在空间中的分布差异(图2)。从结果来看,4个景观空间单元的视觉特征差异较为显著。以开敞度为例,各单元的开敞度集中在区间[4.25,11.16]。单元4的开敞度相对较高,最大值为11.16。单元1的开敞度整体较低,数值区间为[4.25,9.90]。值得注意的是,各单元开敞度的空间分布特征差异较大,数值最大处并非在单元的几何中心,而是位于边缘附近,这可能与单元围合界面、周边相邻区域的开敞程度以及是否有视线通廊有关。
从绿视率的量化结果来看,单元3的整体绿视率较高,数值区间为[0.13,0.54]。单元3的面积在4个单元中最小,人在单元3的空间中与植被的距离较近,且空间周围被高大密植的乔木围合,因此视野中的植被占比较高。从各指标数值在空间中的分布情况来看,绿视率与天空率的分布呈负相关,即绿视率较高的视点,天空率较低。而天空率的空间分布与开敞度有一定的相似性,如单元2的天空率和开敞度分布都呈现出由东北向西南递减的特征,在单元3中两者均表现为东、西部数值高,中部数值较低的状态。
整体来看,景观空间单元内各视觉指标的空间分布特征与单元平面几何形状关联较弱。虽然各视觉指标的数值在空间中呈现连续变化,但峰值与谷值分布的位置与空间内部的要素(如乔木)等有关。如在单元2和单元3中多个指标的极值出现在中部的乔木附近。当空间单元内部为单一的草地或硬质空间时,各视觉指标的数值则呈现出均匀的变化,如在单元4中,除延伸度外,其余指标数值基本呈现出自西向东的渐变特征。当空间单元内部有高大树木存在时,会对人的视觉感知造成显著影响。
4 讨论
4.1 单一视点与空间整体视觉特征比较

在过往对景观空间视觉特征与人群感知偏好的研究中,景观空间单元视觉特征往往用空间中心点处的指标计算结果表征,但这可能与人在实际空间中的体验存在较大偏差。本研究认为空间单元中所有视点的指标计算数值集合能更加全面地反映空间单元的实际视觉特征。因此,本研究对各指标数值进行归一化处理,利用箱型图对单元内视点的视觉特征指标数值分布进行可视化分析,并将空间单元几何中心点的指标数值与整体数值分布进行比对(图3)。
除单元3延伸度指标分布较为集中外,其余指标分布皆较为分散。空间单元几何中心点数值与单元整体数值的分布不存在相关性,这表明空间单元几何中心点的量化结果并不能准确反映人的视觉感受。与相对封闭的室内空间不同,景观空间平面形态多不规则,且空间围合界面变化丰富、步移景异的空间特征要求设计师以整体视角认知空间形态。因此,对景观空间视觉特征的表征应从单一视点指标数值向空间整体多视点指标数值集合转变。
4.2 景观空间视觉特征指标叠加分析
景观空间多种视觉特征指标的mapping结果能够直观地反映景观空间中不同位置视觉特征的连续变化,为预测人群在空间中的活动区域提供了可能。过往学者通过实证研究探讨了景观空间视觉特征与人群行为偏好间的关系。如“瞭望-庇护”理论认为人倾向于在有庇护且具有良好视野、能够眺望远方的环境中活动,这类环境需要有较高的延伸度和复杂度[30]。考虑到人在景观环境中往往处于漫游状态,人对景观环境的感知是在多个位置的感知印象叠加的结果[25]。

在对空间单元多指标量化分析的基础上,以单元2为例,将延伸度、复杂度和绿视率3个视觉特征指标的栅格数值进行等权叠加(图4),对人群在空间中的实际感知和行为特征进行判断,并以方法应用的可能性进行探讨。从叠加结果来看,得分最高的区域位于单元西北部,得分最低的区域位于单元东部公园车行道附近以及单元北部被树木围合的区域。草坪中部的雕塑以及乔木附近得分较高。本研究于工作日傍晚进行实地照片拍摄,发现人群在草坪上聚集的位置与本研究分析结果相近,但人群活动与空间视觉特征间的内在关联机制仍需大量实证研究。
4.3 研究局限
点云可视化方法能够代替人工在景观环境中拍摄照片,且能够得到照片所无法完全涵盖的视觉界面纵深方向的空间信息。虽然该方法在视觉界面模拟、数据分析的效率和精度等方面较传统方法有一定优势,但仍存在局限:
1)从点云数据的采集方式来看,虽然利用无人机倾斜摄影技术得到点云模型的方法较为便捷,但与地面激光扫描采集到的点云数据相比精度较低,模拟的结果无法精确展现植被枝干、树叶等信息;
2)从视觉分析方法来看,视点密度越高,结果的可信度越高,但由于不同环境景观空间的平面形态、面积差异较大,目前无法对视点密度与结果精度的关系进行探究;
3)从适用的景观空间类型来看,由于点云模型中点与点间存在空隙,当空间尺度较小时,模拟视点发出的视线会穿过空隙,导致模拟结果出现误差,且由于点云模型覆盖的空间范围有限,当城市公园外围的高楼、山体或地标等要素出现在人的视野范围内时,需要人工补充建模。
5 结语
本研究提出了一种利用点云可视化技术对景观空间多种视觉特征量化分析的方法。该方法利用了点云模型景观环境空间信息记录精度及运算效率较高的优势,能够对景观空间视觉特征指标进行计算,并以面状栅格形式对结果进行可视化表达。通过在情侣园景观空间中的运用,验证了该方法能够有效展示不同视觉指标在空间中的分布特征。同时,在得到多视觉指标栅格结果后,通过多指标叠加分析能对人群在空间中的视觉感知进行综合判断,有助于预测人群在空间中的活动偏好。
点云可视化技术在探究景观空间视觉特征与人群行为偏好的关联、人对环境的感应以及交互设计等领域具有一定的应用前景。随着虚拟现实、混合现实等技术的发展,测度人对环境的感应的研究方法从传统观看静态照片转向了给人提供更加真实、可沉浸式漫游体验的虚拟环境。在捕捉人群在空间中的位置信息后,利用该方法即可较为精确且高效地对视觉感知界面进行映射,进而较为全面地认知人群视觉感知特征。
在获得景观空间中人群活动与空间分布数据的基础上,利用该方法能够对人群空间分布数据与不同视觉特征指标间的关联性进行分析,从而深入探讨空间视觉特征对人群行为活动的影响机制。此外,点云模型能够便捷地进行修改与编辑,便于设计师在客观认知景观空间视觉特征的基础上,将设计方案嵌入真实的环境模型中,有助于设计师直接观察方案的视觉特征,进而辅助方案优化。


