点云建模 vs 软件默认植被:梅庵微气候模拟精度实证对比
文章目录导航(TOC)
应用实例
3.1 案例选取
本研究以东南大学四牌楼校区梅庵周边为例,探讨基于三维点云模型的景观微气候模拟分析方法可行性。梅庵周边植被密集、种类繁多,由于年代久远,植被冠幅巨大且彼此间相互连接,空间形态极为复杂,本方法具有较高的运用价值。
3.2 实验过程
1)环境数据采集。
在由专业人士提前进行场地实地调研后,于2021年10月15日分别利用FARO地面基站式三维扫描仪和大疆Gopro型号无人机获取近地面场地三维点云数据和倾斜摄影模型。将2台Davis Vantage pro 2气象仪分别放置在场地中较为开敞和植被围合度较大的2处,高度距地面1.5m。数据采集时间自2021年9月31日12:00起,当日天气晴朗无云,至2021年10月31日12:00结束,共计1个月时间。采集数据类型包括空气湿度、空气温度及风速3项指标,每1h读数一次。环境气象参数利用长期固定放置在校园教学楼楼顶处的气象仪进行记录。
2)数据处理。
利用ContextCapture软件将倾斜摄影模型与地基扫描点云数据加以融合,再在Trimble Realworks平台中进行地理坐标配准、数据清理、重采样及分类。将精确分类后的植被点云导入Lidar360软件中,利用地基单木分割工具集,并通过人工精确单木分割处理,得到场地红线中乔木的精确点云模型(图3)。从分割后得到的植被点云模型可基本真实反映出场地现状植被形态特征,并结合实地调研记录下场地植被种类。
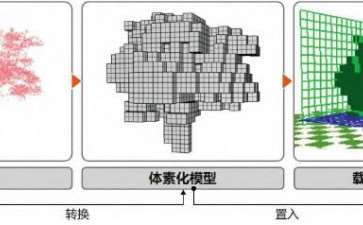
3)空间建模。
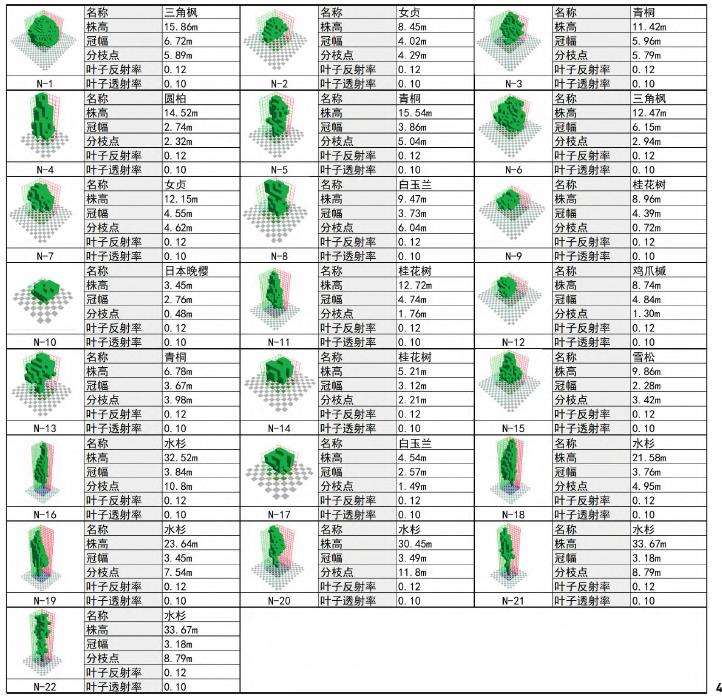
为确保模拟范围边界条件的相对精确,本次建模范围以研究场地红线为界外扩50m作为模拟分析范围,在Rhino中对建筑及地面进行建模;并对各植被点云数据进行体素化处理,红线范围内共计22株乔木及大灌木(图4),而现状地被以低矮草本植物为主(高度小于10cm),将不纳入建模对象范畴。
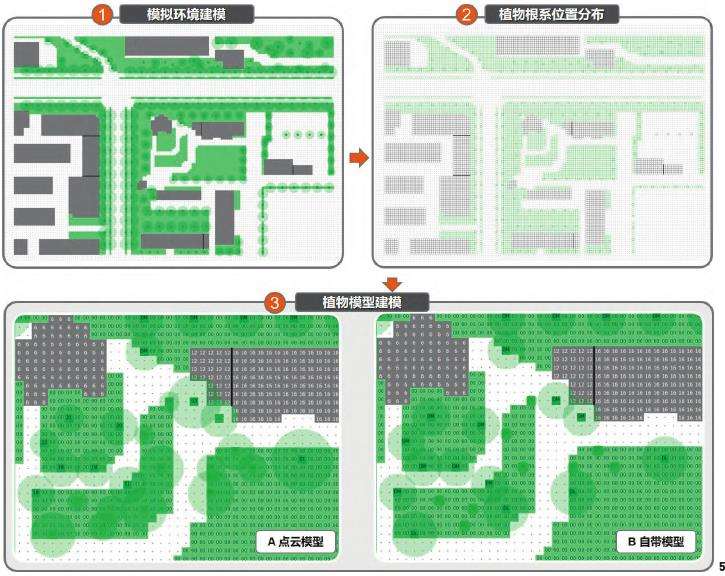
4)微气候模拟。
利用dragonfly插件将建筑及地面模型导入Envi-met中,并根据现状植被分布情况设置水平与垂直方向总体格网数量。研究范围大小为240m×290m,共划分为120×145格网,格网分辨率为2m。考虑到研究范围内要素最大高度为25m,为消除顶部边界效应对模拟结果的影响,垂直方向设置100个格网。以所获取的现状植被体素中心点坐标为参照,在Albero中进行对应的植被精准建模。从而得到研究场地的完整分析模型。
在完成场地建模后,为进一步证实本文所述分析方法的可行性及输出结果的精准性,在研究中设置对照组,即采用Envi-met自带植物库对场地中各植被进行建模,并以同样的输入、输出参数进行微气候模拟,作为对比实验组。
最终,将点云模型与自带模型2种分析场景下所输出的模拟结果与实测数据进行综合比照(图5),以论证基于植被点云模型的微气候模拟计算的可操作性及精准性。
本次研究自2021年10月1日12:00起,每隔7d连续选取2021年9月31日—10月31日1个月时间内的数据,保证实测时间与模拟时间起始节点的一致性。其中,模拟中所涉及的初始气象参数均来源于各天的实测数据;背景数据则以常年(2015—2021年)位于临近教学楼屋顶的全年气象监测数据为参照;土壤参数来源于中国气象数据网。最终,以空气温度、空气湿度、风速3项指标作为输出参数,以1h为间隔,输出24h的全时段气候数据。
5)结果可视化。
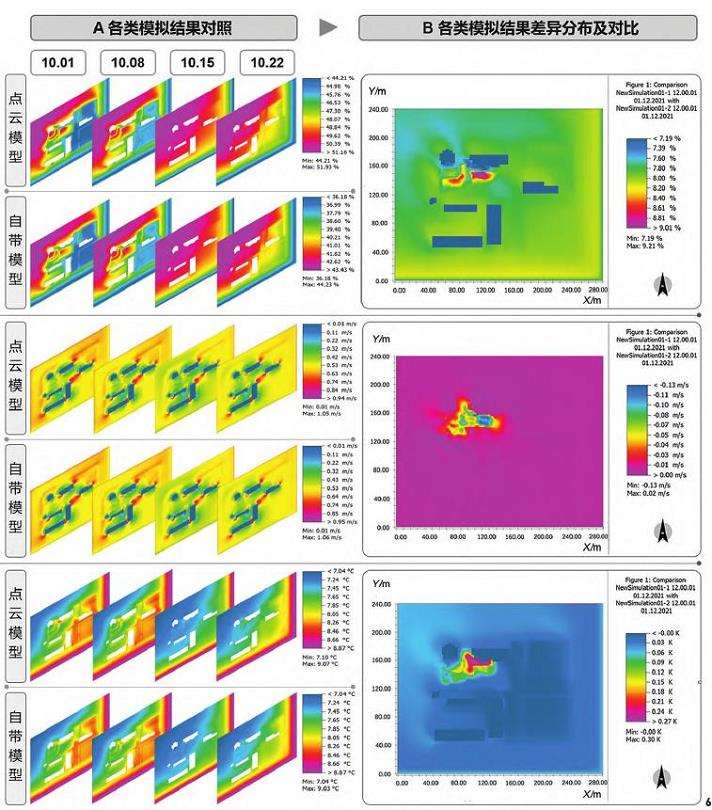
每隔7d连续选取2021年9月31日—10月31日,即2021年10月1、8、15、22日12:00的模拟结果,利用软件自带的可视化工具Leonardo对研究区域内2组的空气温度、空气湿度及风速的模拟结果进行可视化表达,以直观展现梅庵周边的微气候特征及指标分布差异(图6)。
由组1和组2模拟数值的可视化结果可以看出,2组计算结果在空间分布上存在一定的差异性。以2021年10月1日12:00的模拟结果为例,越靠近研究范围内树种形态不同的区域,其指标差异性分布就越明显。
3.3 模型比照
通过模拟结果的可视化对比分析可以看出,2组计算结果在空间分布和数值上存在明显差异,而进行对照的2组之间的唯一变量即为研究范围内的植物形态。因此,可视化分析的结果已经证明,即使位置分布相同,植物形态的精细度差异也会直接导致模拟计算结果的不同。但若要进一步证明模拟精度的具体差异,还需要与实测值进行定量的计算对比。
同样,每隔7d连续选取2021年9月31日—10月31日,即2021年10月1、8、15、22日的模拟结果,将Envi-met所输出的模拟结果与实测数据加以比照,采用Fox相关评价指标及一致性指数进行判断,其中相关评价指标采用均方根误差(RMSE)、平均绝对偏差(MAE)、一致性指数(d)3个指标对基于Envi-met自带植物库建模的模拟值与基于点云扫描模型建模的模拟值进行比较,从而对2个Envi-met模型的模拟精度进行评价。其中,一致性指数d代表模拟值与实测值的趋近程度,d的数值越接近1,则模拟值与实测值的吻合度越高。
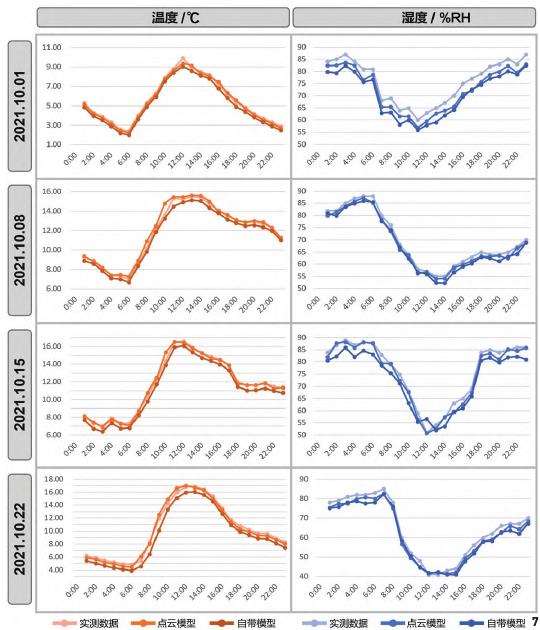
2组计算所得的微气候模拟结果在总体趋势上与实测值均保持较好的一致性,反映出Envi-met软件在景观环境微气候模拟中的显著优势(图7)。对比组1(表1)和组2(表2)的计算数据可知,组1的一致性指数d普遍高于组2,说明组1的模拟结果与实测值更加趋近,即说明基于点云扫描数据进行植物建模的模拟结果精度高于目前普遍使用的基于Envi-met自带植物库建模的结果。其中,空气温度和空气湿度2项的一致性指数差值范围在0~0.005,风速的一致性指数差值范围在0.005~0.076,所以相较于空气温度和空气湿度,风速测算上显现出了更高的精准度。